1.1 Jetbotmini-AI开源机器人
Jetbotmini是一款基于NVIDIA Jetson Nano开发,可供嵌入式设计人员,研究人员和DIY制造商使用的开源机器人,处理器部分由采用四核64位ARM CPU和128核集成的NVIDIA GPU组成,带来的强大性能和其提供了完整的桌面Linux环境,和具有图形加速、支持NVIDIA CUDA Toolkit 10.0以及cuDNN 7.3和TensorRT等特色功能的支持,使得该平台成为跨入AI学习大门的不二之选。
SDK包括本机安装流行的功能开源机器学习(ML)框架,如TensorFlow,PyTorch,Caffe,Keras和MXNet,以及计算机视觉和机器人开发的框架,如OpenCV和ROS。完全兼容这些框架和NVIDIA领先的AI平台,可以比以往更轻松地将基于AI的推理工作负载部署到Jetson。Jetson Nano为各种复杂的深度神经网络(DNN)模型提供实时计算机视觉和推理。构建和使用Jetbotmini可以为你提供创建全新AI项目所需的实践经验。
| 处理 | |
|---|---|
| 中央处理器 | 64位四核ARM A57 @ 1.43GHz |
| GPU | 128核NVIDIA Maxwell @ 921MHz |
| 记忆 | 64位LPDDR4 @ 1600MHz | 25.6 GB / s |
| 视频编码器* | 4Kp30 | (4x)1080p30 | (2x)1080p60 |
| 视频解码器* | 4Kp60 | (2x)4Kp30 | (8x)1080p30 | (4x)1080p60 |
| 接口 | |
| USB | 1x USB 3.0 A(主机)+ 2 x USB2.0 | USB 2.0 Micro B(设备) |
| 相机 | MIPI CSI-2 x1(15位Flex连接器) |
| 显示 | HDMI |
| 联网 | 千兆以太网(RJ45) |
| 无线 | 无 |
| 存储 | MicroSD卡(建议最低16GB UHS-1) |
| 其他I / O. | (3x)I2C | (2x)SPI | UART | I2S | 个GPIO |
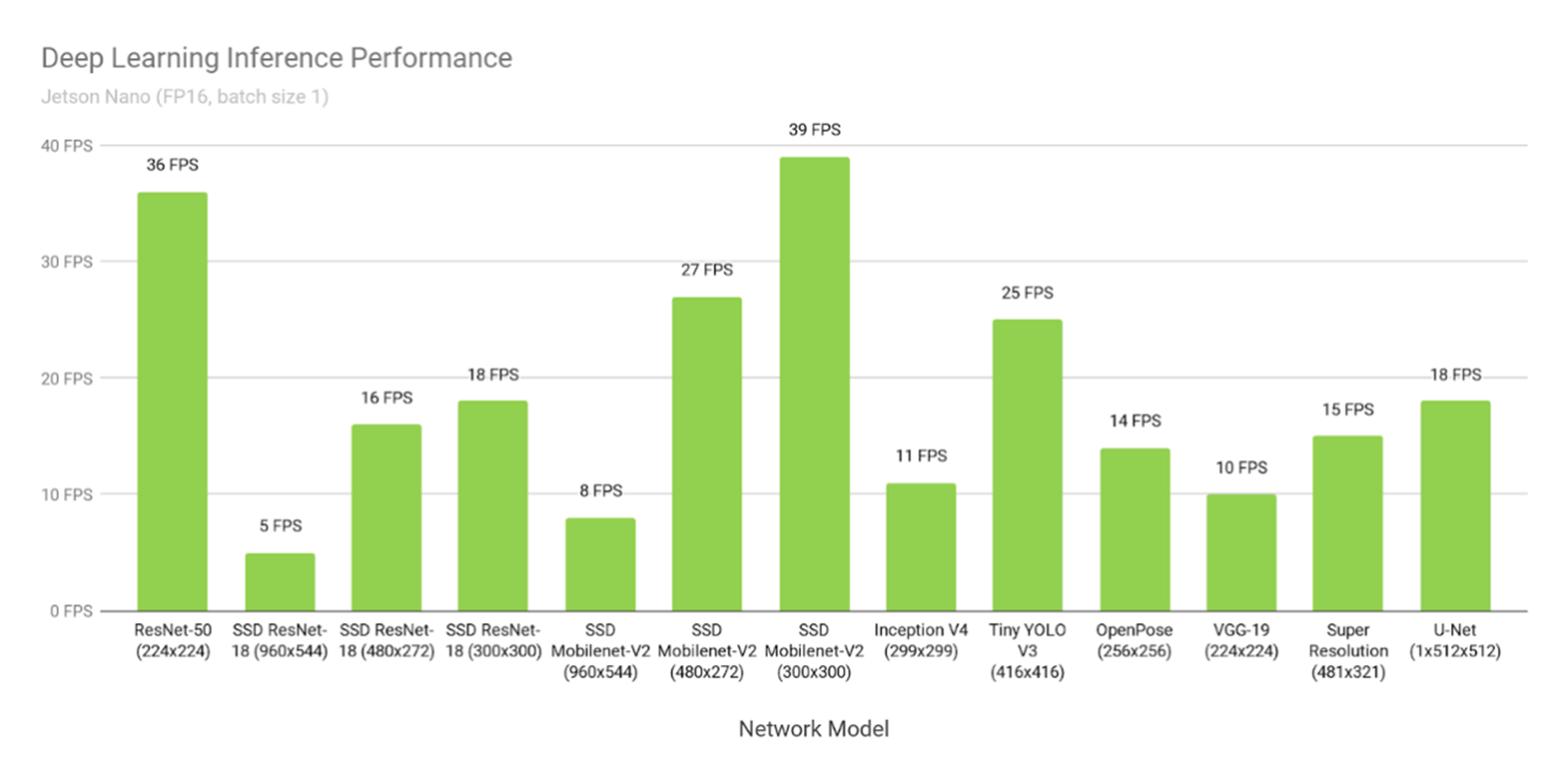
表2提供了完整的结果,包括其他平台的性能,如Raspberry Pi 3,Intel Neural Compute Stick 2和Google Edge TPU Coral Dev Board:
| 模型 | 应用 | 骨架 | NVIDIA Jetson Nano | 树莓派3 | Raspberry Pi 3 + Intel神经计算棒2 | Google Edge TPU 开发板 |
|---|---|---|---|---|---|---|
| ResNet-50 (224×224) | 分类 | TensorFlow | 36 FPS | 1.4 FPS | 16 FPS | DNR |
| MobileNet-v2 (300×300) | 分类 | TensorFlow | 64 FPS | 2.5 FPS | 30 FPS | 130 FPS |
| SSD ResNet-18(960×544) | 物体检测 | TensorFlow | 5 FPS | DNR | DNR | DNR |
| SSD ResNet-18(480×272) | 物体检测 | TensorFlow | 16 FPS | DNR | DNR | DNR |
| SSD ResNet-18(300×300) | 物体检测 | TensorFlow | 18 FPS | DNR | DNR | DNR |
| SSD Mobilenet-V2(960×544) | 物体 检测 | TensorFlow | 8 FPS | DNR | 1.8 FPS | DNR |
| SSD Mobilenet-V2(480×272) | 物体检测 | TensorFlow | 27 FPS | DNR | 7 FPS | DNR |
| SSD Mobilenet-V2 (300×300) | 物体检测 | TensorFlow | 39 FPS | 1 FPS | 11 FPS | 48 FPS |
| 成立V4 (299×299) | 分类 | PyTorch | 11 FPS | DNR | DNR | 9 FPS |
| 小小的YOLO V3 (416×416) | 物体检测 | 暗网 | 25 FPS | 0.5 FPS | DNR | DNR |
| OpenPose (256×256) | 姿势估计 | 咖啡 | 14 FPS | DNR | 5 FPS | DNR |
| VGG-19(224×224) | 分类 | MXNet | 10 FPS | 0.5 FPS | 5 FPS | DNR |
| 超高分辨率(481×321) | 图像处理 | PyTorch | 15 FPS | DNR | 0.6 FPS | DNR |
| UNET (1x512x512) | 分割 | 咖啡 | 18 FPS | DNR | 5 FPS | DNR |
表2. Jetson Nano,Raspberry Pi 3,Intel Neural Compute Stick 2和Google Edge TPU Coral Dev Board的推理性能结果。由于内存容量有限,网络层不受支持或硬件/软件限制,DNR(未运行)结果频繁发生。
● 索尼定制800万高清摄像头
● 能够进行快速响应的高精度PID算法颜色追踪应用
● 能够进行快速响应的人脸识别应用
● 两路PWM舵机
● 万向轮加两个电机移动方式
● 轨道自动驾驶应用
● 独立于PC端控制的FPV(第一人称视角)视频实时显示,运动遥控
● 0.91’迷你OLED 实时显示Linux系统运行状态信息
● 蜂鸣器、多个LED进行硬件控制学习
● PC端通过Web浏览器进行交互式编程,提供基本运动控制,AI框架使用,手柄遥杆全方位遥控,自动跟随,自动驾驶等底层代码多例程教程, Jupyter notebook AI在线编程调试
● 通过VNC或外接屏幕进行ROS程序学习
● 出厂系统全环境配置,到手即玩
● 支持CUDA加速, TensorFlow,PyTorch等全主流AI框架和AI入门从0到1教程的机器学习平台